
 ספטמבר
23
ספטמבר
23
תגיות
שיפוץ משאבת דלק חשמלית מטיפוס .S.U – ג'.
בשעה טובה יש בידנו דו-מצב ודיאפרגמה מכוונים כהלכה. וכשמחברים מתח לסליל – יורד(ים) המגע(ים), והם עולים חזרה כשהמתח מוסר.
עכשיו הגיע הזמן להרכיב את המגע הנגדי, הנמצא על להב המגעים. את הלהב מצמידים לכן-המגעים על ידי בורג 5BA. יש לכוון אותו כך שינוח מעט מעל המגעים הנגדיים כשהם במצב נתק (כלומר כשיש מתח על הסולנואיד). קצה הלהב שתחת הבורג מחורץ, כך שיש מרחב מסויים לכוונון. בלהבים מתקדמים ניתן לכוון את המרווח בין המגעים בנתק על ידי בורג נוסף, ובמוקדמים יש לעיתים לכופף אותם עד שמושג המרווח הנכון.

אם הרכבנו דו-מצב "מתקדם" (ראו הפרק הקודם) ניתן לכוון את מהלכו לערך שממליץ היצרן על-ידי כיפוף מגבילי התנועה X ו Y:
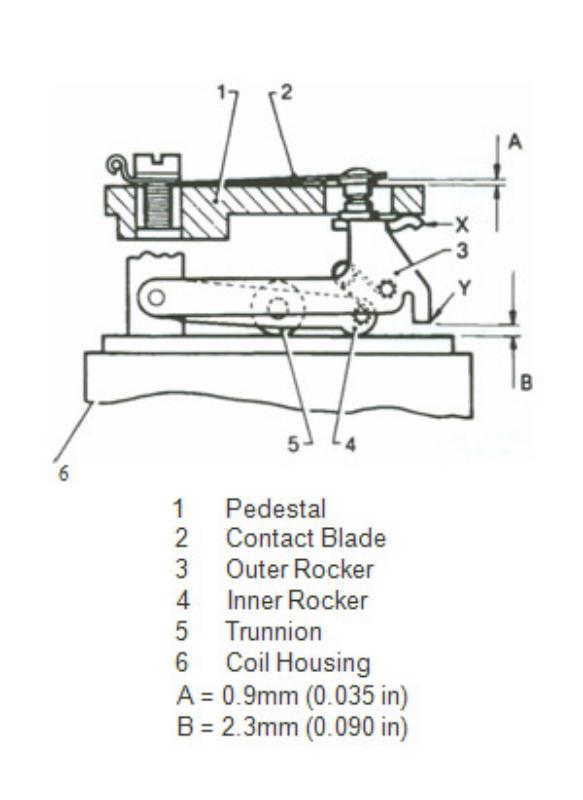
המדידה נערכת באמצעות feeler gauge.
אנחנו מוכנים עכשיו להפעלה נסיונית של הדיאפרגמה ומעגל ההפעלה החשמלי שלה.
המעגל החשמלי הבסיסי של המשאבה, וזה שהורכב בפועל בדגמים המוקדמים, נראה בשרטוט הבא:
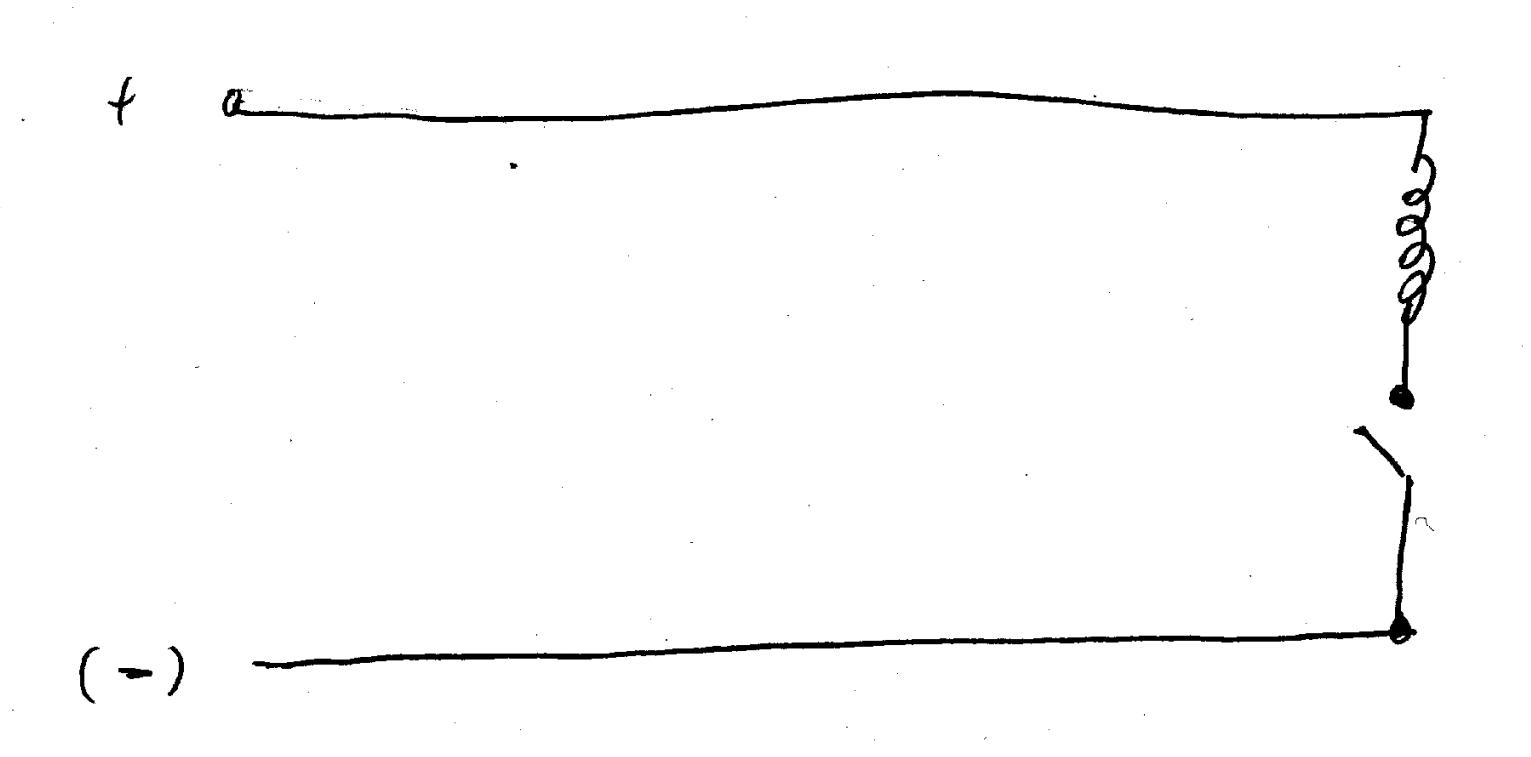
זה מעגל מטיפוס "הפעמון-החשמלי" – כלומר, כשהמגעים סגורים (יש מגע) מושך אותם הסולנואיד וגורם לניתוקם. עם הניתוק נפסקת פעולת הסולנואיד, הדו-מצב מחליף צד, המגע מתחדש וחוזר חלילה. ללא הדו-מצב היתה הפעולה מסתכמת בריטוט מהיר ובעל משרעת מינימלית של הדיאפרגמה (אופייני למשאבות פגומות מטיפוס .S.U). אבל מכיוון ששינוי מצב בדו-מצב דורש מהלך ניכר של הדיאפרגמה (העוגן), וזה לוקח זמן, נמשך כל מחזור כזה כ-50 אלפיות השניה, כשהמשאבה תקינה וריקה מדלק, כלומר יתכנו עד 20 מחזורים בשניה – זה תפקידו וזו מהותו של הדו-יציב: לתת זמן לסולנואיד כדי למשוך די הצורך את הדיפרגמה. בכל משיכה שלה מתפנה נפח בגוף המשאבה – וזה נפח הדלק שנשאב בכל פעימה של המשאבה. בלעדי הדו-יציב היתה משיכה כזו מגיעה למרחק קצר מדי, הנפח שמתפנה היה קטן מדי, וכמות הדלק שהיתה נשאבת היתה קטנה מדי גם היא.
במעגל הבסיסי שלמעלה פורץ ניצוץ חזק בין המגעים בכל פעם שהם נפתחים. הסיבה לכך היא "חוק רציפות הזרם". בניצוץ זה כרוכים גם נזק וגם סכנה. הנזק נגרם למגעים: הניצוץ מתפקד כריתוך חשמלי המאכל לאיטו את המגעים ומוציא אותם מכלל פעולה. הסכנה נובעת מכך שמדובר במשאבת דלק – ומספיקה דליפה קטנה כלשהי ממנה כדי שבסביבתה תהיה תערובת נפיצה של דלק ואוויר. הניצוץ הנ"ל יכול לגרום לתערובת הזו להתפוצץ ולהעלות את המכונית באש.
אי-לכך, ומן הסתם בעיקבות לקחים מרים, החלו ב .S.U לשנות בהדרגה את המעגל. הוריאציה הראשונה היתה הכללת קבל, בדומה לקבל הנמצא במעגל הצתת המנוע הכולל סליל ( coil, המשובש על ידי מכונאים זקנים ל"כוהל") ומגעים מכניים (“פלטינות").

היתרון של מעגל זה הוא היותו בלתי רגיש לקוטביות המתח, והוא יפעל בהצלחה שווה במכוניות בעלות "אדמה חיובית" או "אדמה שלילית". החסרון שלו הוא האפקטיביות הנמוכה שלו. הוא מקטין את הניצוץ אך לא מבטל אותו.
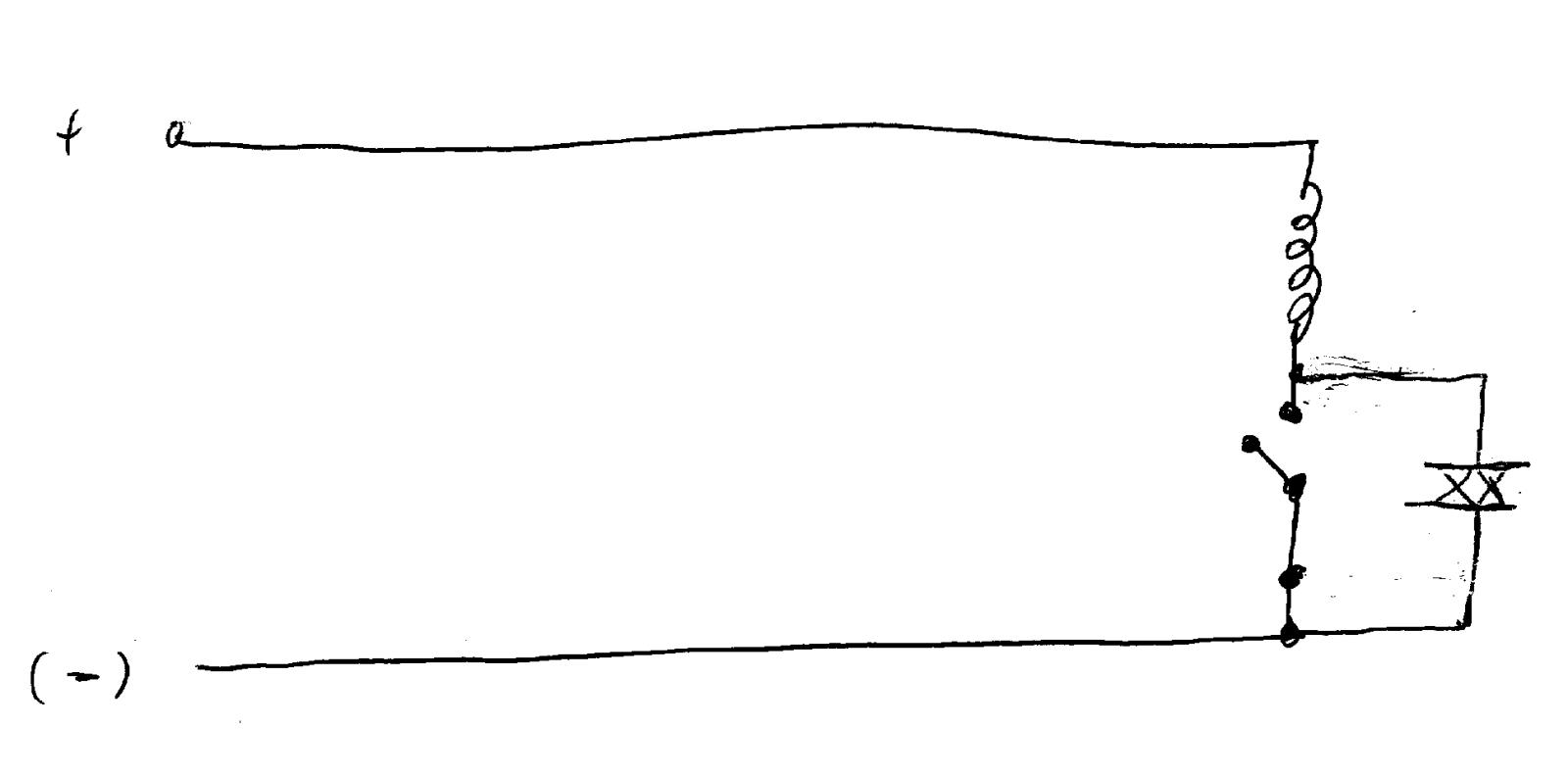
התפתחות נוספת היתה השימוש בדיודה למניעת הניצוץ:

מכיוון שחוק רציפות הזרם מחייב שעם פתיחת המגעים יתפתח עליהם מתח הפוך – הדיודה הזו פשוט מקצרת אותו ושום ניצוץ לא יתפתח. מעגל זה רגיש לקוטביות המתח וחיבור משאבה עם מעגל כמו בשרטוט שלמעלה (אדמה שלילית) למכונית בעלת אדמה חיובית יגרום לשריפתו המיידית. .S.U נוהגים לסמן משאבות רגישות למתח בסרט צבעוני: שחור לאדמה שלילית ואדום לאדמה חיובית.
עוד התפתחות היתה השימוש ב MOV לסוגיו. רכיב זה לא מאפשר למתח מעל גודל מסויים להתפתח עליו, וכך מונע היווצרות ניצוץ. הוא לא רגיש לקוטביות.
אבל לכל המעגלים הללו עדיין נותרו שני חסרונות רציניים: המגעים חייבים להוביל זרם גבוה (כ 3 אמפר למשאבות 12 וולט, ששה אמפר למשאבות 6 וולט), ואי לכך עליהם להיות בעלי מוליכות גבוהה, חופשיים תמיד מלכלוך, חלודה ושמן ובעלי שטח פנים חלק; והם סובלים, לרוב, מרטיטות (bouncing).
עם בעיות אלו התמודדה .S.U לאחרונה על ידי הוצאה לשוק של רכיב אלקטרוני המחליף את הדו-מצב והמגעים גם יחד.
אבל בעוד הדיעות על טיבו חלוקות, על עובדה אחת אין חילוקי דעות: הוא יקר – מחירו כ 250 ש"ח לפני מיסים ומשלוח.
לפני כשלושים שנה ויותר הסבתי את אחת המשאבות שברשותי להפעלה אלקטרונית והיא פעלה כך ללא דופי במשך למעלה מ-25 שנה – עד שהשסתומים והדיאפרגמה שבה כשלו (אבל לא המעגל). המעגל פשוט בתכלית ומחיר שלושת חלקיו הוא שקלים אחדים:
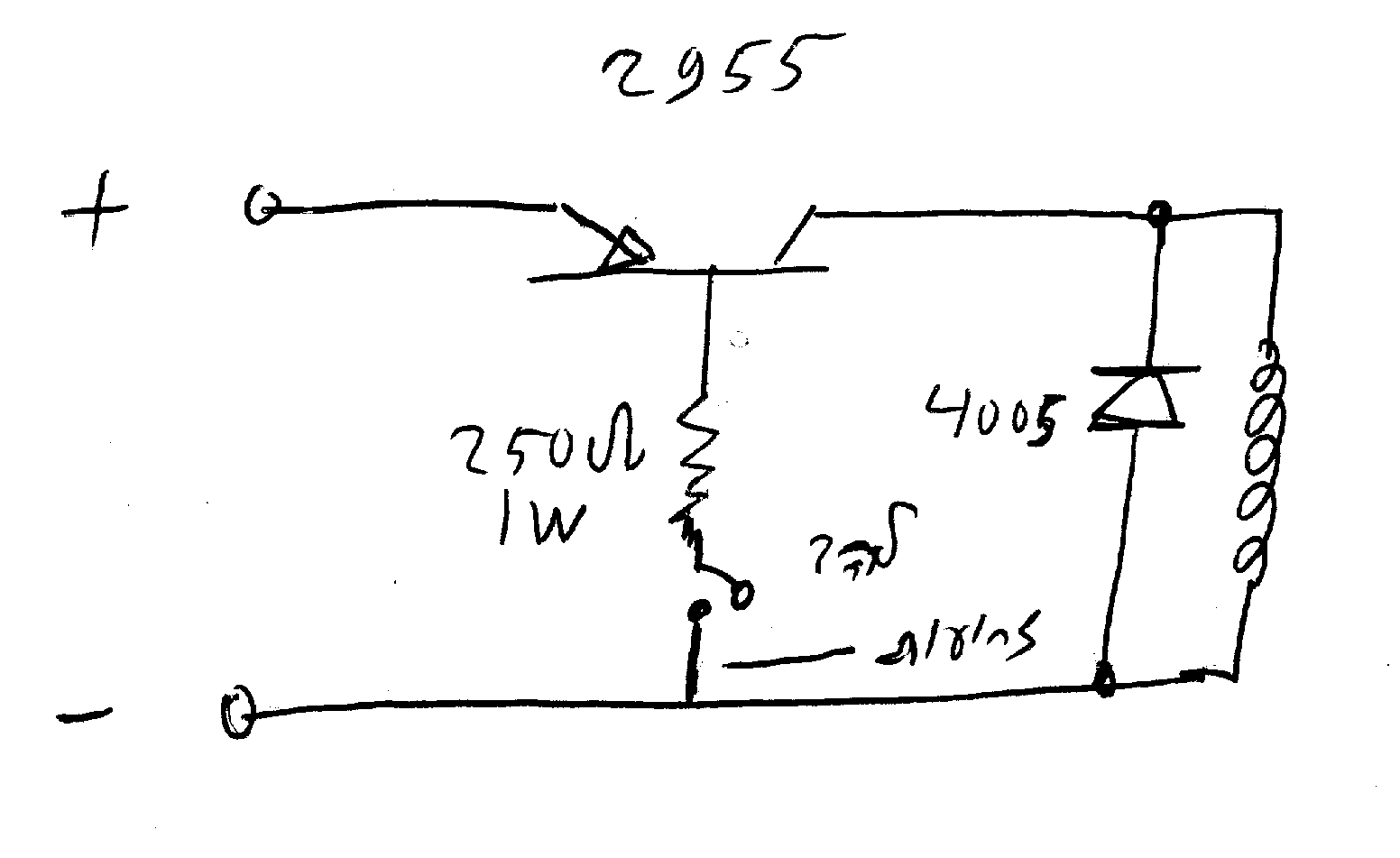
במעגל זה תפקיד המגעים הוא להזרים זרם במעגל הבסיס של הטרנסיסטור (2N2955 או אקויולנטי לאדמה שלילית, 2N3055 או אקויולנטי לאדמה חיובית). הזרם דרך המגעים יורד מכ-3 אמפר ל-50 מיליאפר, וכמובן – אין ניצוץ כי המעגל התנגדותי טהור.
הזדרזתי איפה לחבר את המעגל הזה למשאבה בה הורכבו זה עתה הדיאפרגמה והדו-יציב כפי שתואר לעיל. חיברתי למעגל גם את גשש (probe) הסקופ הקטן שלי כדי לבדוק את צורות הגל בפעולה. עם החיבור למתח החלה המשאבה העתיקה לתקתק בכל עוז ואלו צורות הגל שנצפו בסקופ:
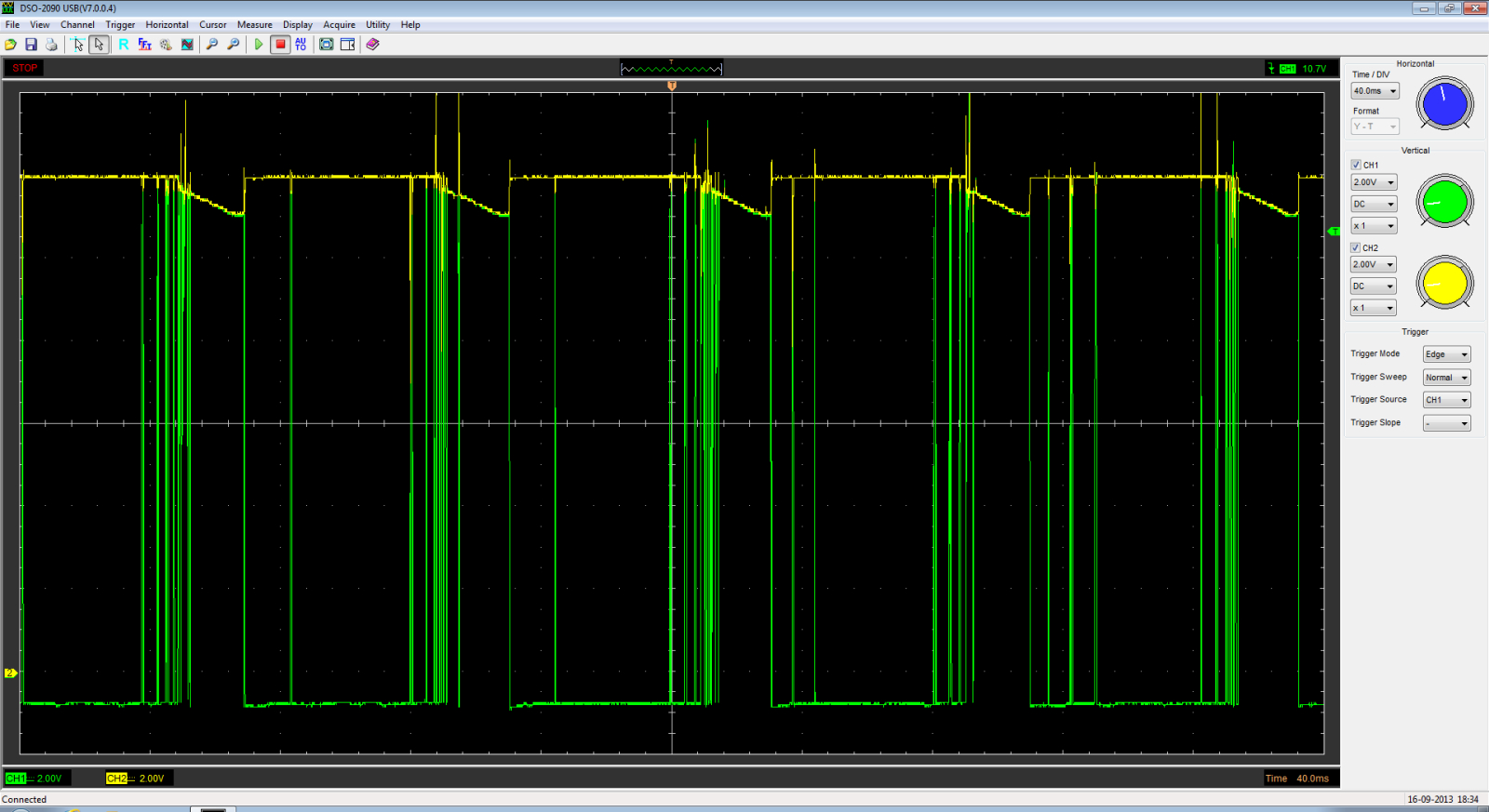
ניתן ללמוד מכך דברים אחדים, אבל לפני הכל על קיום רטיטות עזות בלהב המגע. ואמנם, נגיעה רכה באצבע בלהב מרגיעה את ריטוטיו:

אגב, במעגל המקורי רטיטות אלה הן ממש אסון ויגרמו לבלאי מהיר ביותר של המגעים. ניתן עכשיו להכנס לפרויקט רחב היקף של מציאת דרכי ריסון מכניים למגעים שיגרמו להם לחדול לרטט מצד אחד, ולהמשיך לתפקד מצד שני. במקום, העדפתי לשנות במקצת את המעגל על ידי תוספת FET ונגד-קבל (מחירם זעום).

כשהמגעים נסגרים, יורד המתח על השער (gate) של ה-FET בבת-אחת לאפס, הוא נכנס לקטעון והטרנזיסטור (והסולנואיד) נכנסים להולכה, כפי שצריך להיות. אבל כשהמגעים נפתחים הקבל נטען והמתח עולה לאיטו. כל זמן שהריטוטים ימשכו לא יגיע המתח אל מתח הסף של ה FET. רק מעל למתח של כשני וולט ה FET נכנס להולכה עמוקה, ואז המתח על בסיס הטרנזיסטור יורד לאפס והוא נכנס לקיטעון, וכך מנותק הסולנואיד – כפי שצריך להיות כשהמגעים פתוחים.
אלו צורות הגל שהתקבלו עם המעגל הזה, ללא שום ריסון של להב המגעים:
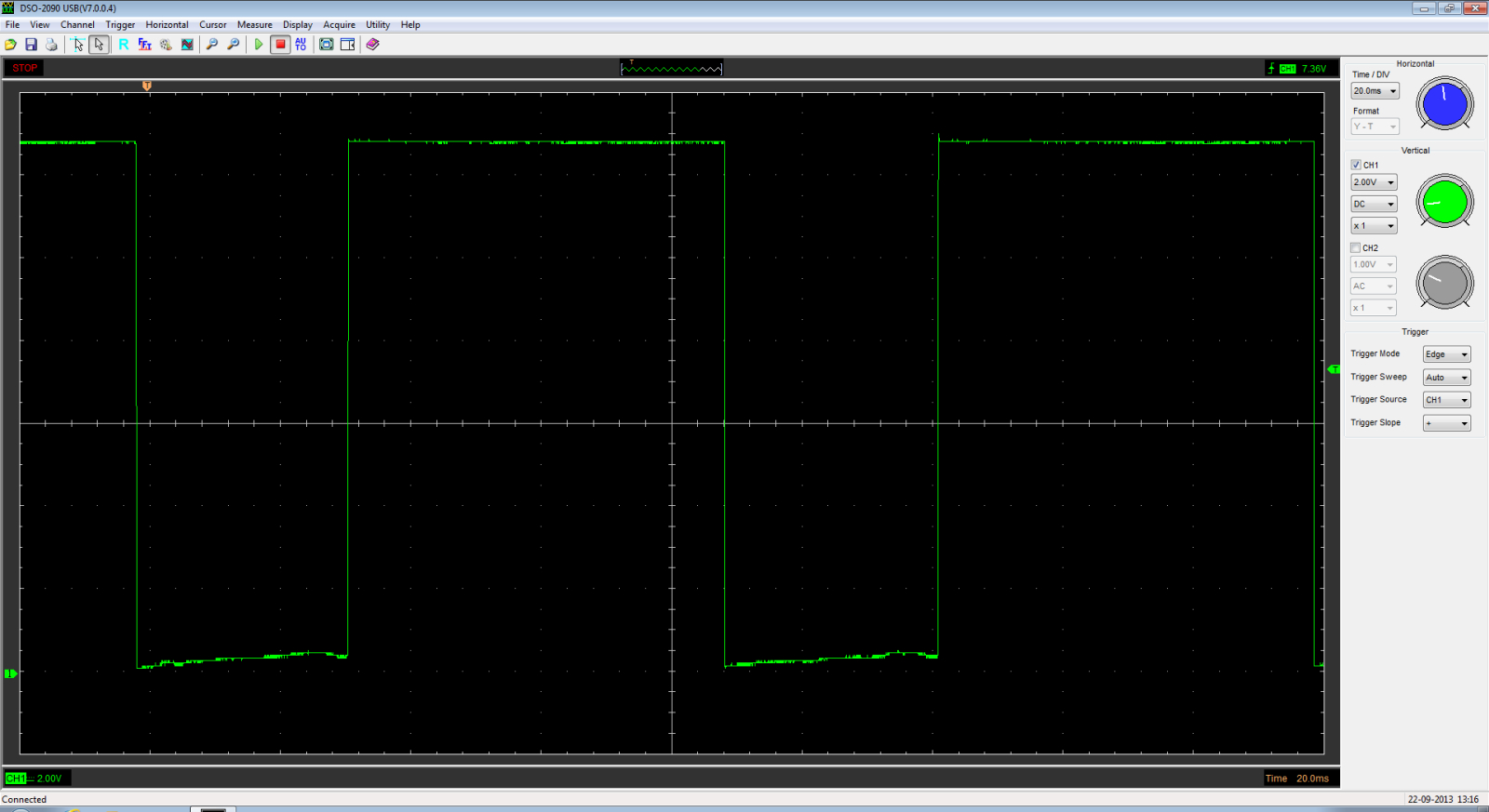
המתח על הסולנואיד

המתח על הסולנואיד (גל מרובע) והמתח על המגעים (טעינה אקספוננציאלית) מוצגים סימולטנית. שימו לב לריטוטים במתח המגעים "שלא מזיזים" לסולנואיד.
הזרם דרך המגעים במעגל זה הוא בסך הכל כעשירית מיליאמפר – פי שלושים אלף יותר קטן מהזרם אותו תוכננו לשאת – מה שאומר כי הם יכולים גם להיות מלוכלכים וחלודים בלי שהדבר ישפיע על פעולתם. הזרם הרציף דרך הסולנואיד גורם לכך שהוא עושה את המקסימום שהוא יכול; אבל יותר מכך: המעגל עצמו מתנהג עכשיו כדו-יציב, ואנחנו יכולים לשלוט על תכונותיו על ידי שינוי המכפלה RC. כיצד זה משפיע על השאיבה נראה בהמשך.
במושב xxxxxx יש שלדה של רובר
אולי תמצא בה ענין.
הייתי במקום – זה לא רובר.
יוזמה מבורכת תיקון משאבת דלק
מסתבר שאפשר לתקן משאבת דלק ישנה